遥测/串口设置
本文介绍如何在飞行控制器上配置遥测端口(也称为串行端口)。 说明使用Pixhawk,但它们适用于大多数飞行控制器。
概观述
在Pixhawk上共有5个串行端口。 每个端口的默认使用是:
微型USB端口(也称为Serial0)用于使用USB电缆连接到地面站。 这不应该在飞行中连接,因为飞行代码如果飞控通过usb供电某些故障浆被禁用(如电池故障保护)。
Telem1(又名Serial1)用于MAVLink通讯,支持流量控制。 特别适用于高功率器件(高达1安培),如RFD900遥测无线电
Telem2(又名Serial2)用于MAVLink通信,并支持流量控制。
GPS(又名Serial3)用于连接GPS
串行4/5在单个端口上包含两个串行连接。 Serial4通常用于第二个GPS。 Serial5是一个调试连接(debug)。遥测/串口设

通过地面站设置
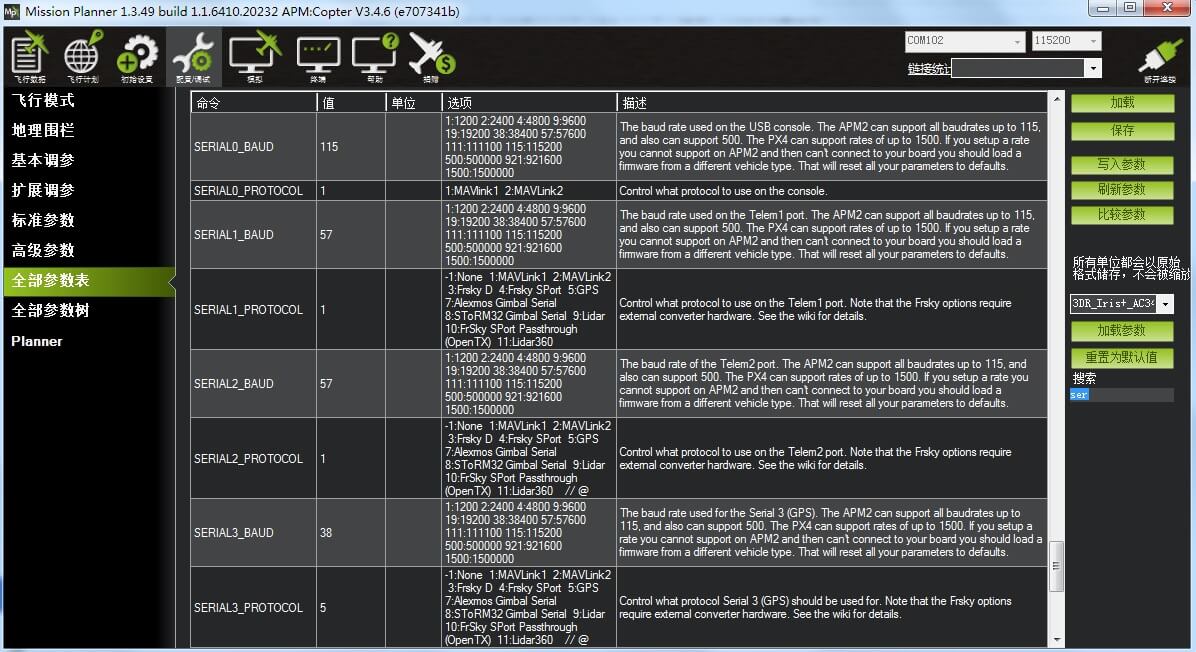
遥测端口可以通过地面站设置配置下列参数。 如果您正在使用mp地面站打开配置/调优|全部参数列表页面。
SERIALx_PROTOCOL参数(“x”是一个数字从0到4)控制协议或串行端口的目的。 您将看到维基页面包括Lightware激光雷达页面说明选择合适的协议。SERIALx_BAUD设置波特率或串行端口的速度。BRD_SER1_RTSCTS和BRD_SER2_RTSCTS参数允许启用或禁用Telem1和Telem2流控制。
 MAVLink1,MAVLink2和流速
MAVLink1,MAVLink2和流速
对于用于MAVLink通信的遥测端口,您可以通过将SERIALx_PROTOCOL设置为“2”将SERIALx_PROTOCOL设置为“1”或MAVLink2来选择使用MAVLink1。
MAVLink2支持“签署”数据包,从而提高安全性和灵活长度的消息,因此应尽可能使用,但某些较旧的遥测无线电不能理解MAVLink2,因此默认为MAVLink1。
如在遥测日志页面中所述,可以使用SRx_ *参来控制从飞行器发送的速率信息。
mp地面站的配置/调整|计划程序屏幕的遥测率下拉列表可以方便地设置这些参数。
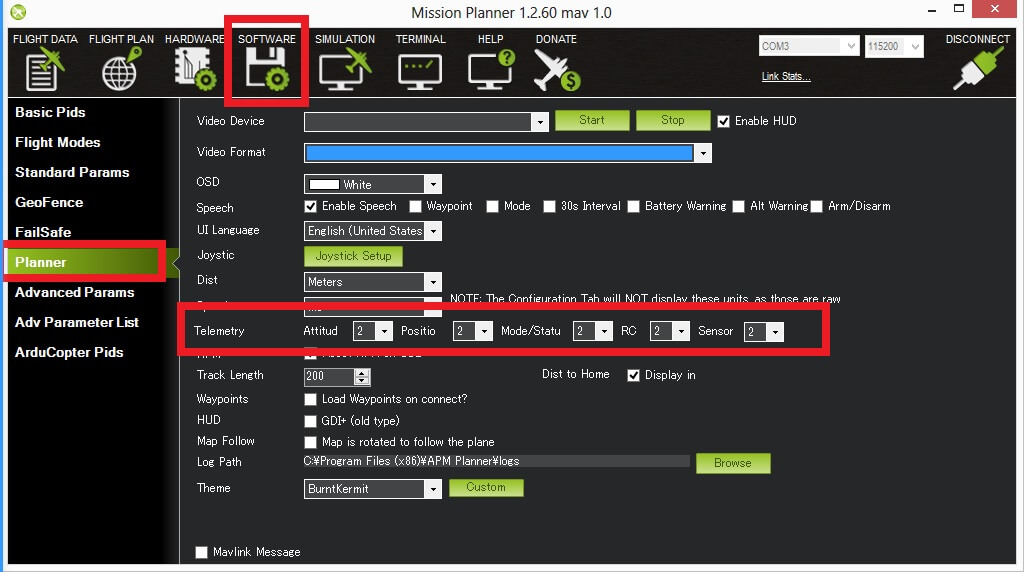 由于CPU带宽限制,实际发送的数据率可能低于要求。
由于CPU带宽限制,实际发送的数据率可能低于要求。